| 核心產品與型號 | 應用場景與技術方向 | 關鍵技術點 | 問題與解決方案 | 成本與組件優化 |
|
應廣單片機 PFC161微控制器 PMS152微控制器 SOT23-6封裝 SOIC8封裝 |
步進電機驅動方案 低成本微控制器開發 低功耗電機控制 H橋電路設計 兩引腳控制H橋 |
三態控制(拉高/拉高/高阻) MOSFET驅動電路(N-MOSFET 2N7002, P-MOSFET BSS84) 電源噪聲抑制 微控制器睡眠模式(stopsys命令) 喚醒機制(PxDIER寄存器配置) |
步進電機控制振蕩抑制 晶體管保護二極管缺失問題 電源去耦電容設計(10μF電解電容) 微控制器喚醒電流優化 |
低成本步進電機驅動 晶體管數量縮減方案 SMD0402電阻/電容選型 分壓電阻泄漏電流優化 |
由于設備的尺寸和重量是這個項目的重要參數之一,我想盡可能減少費用。起初,決定在SOT23-6外殼中使用PFC161微控制器。然而,事實證明,駕駛步進發動機只有2個自由喇叭(2針 - 動力,2腳 - 輸入和數據輸出)。
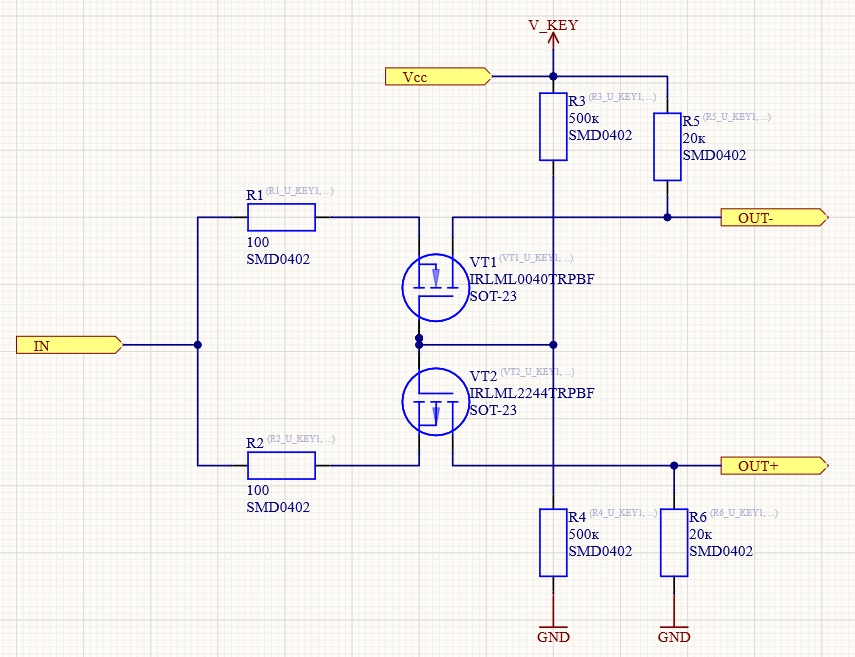
而這兩個引腳必須由兩個N橋控制。任務并不容易。請記住,每個引腳微控制器可以處于三個狀態(拉到+,拉到GND和HZ),該方案被提出到以下H橋控制方案:
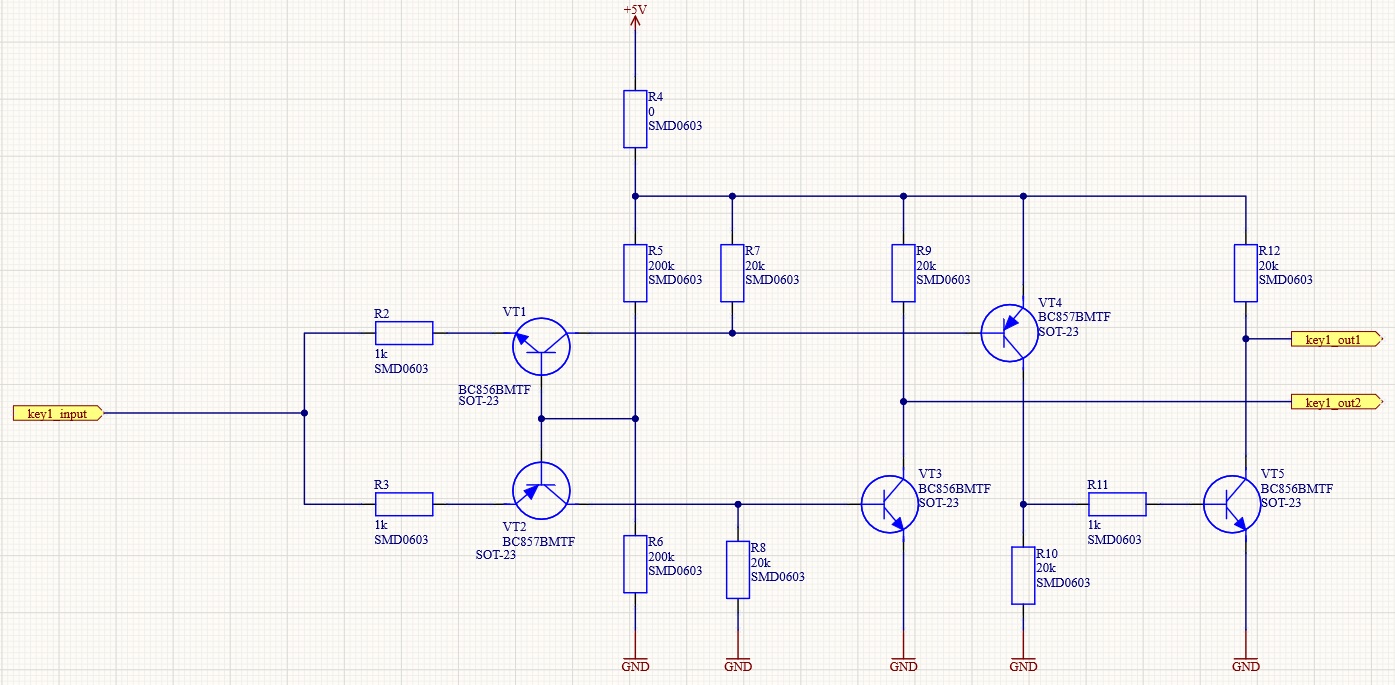
當 key1_input 被給出正極性信號(拉到 +)時,VT1 發射器的電位將高于基電位,這不會允許它打開。同時,發射器VT2的電位變得高于底座的電位,并且由于它是PNP晶體管,因此它打開。沿途流動的電流:key1_input – R3 發射機 VT2 – VT2 收集器 – VT3 載波基礎。因此,VT3 打開,低邏輯水平出現在 key1_out2 的退出處。
當 key1_input 被拉到 GND 時,VT1 晶體管打開,VT2 關閉,因此 key1_輸出被壓到地面。
因此,使用
三種PC狀態微控制器可以創建兩個信號來控制
N橋。橋的基本方案如下:
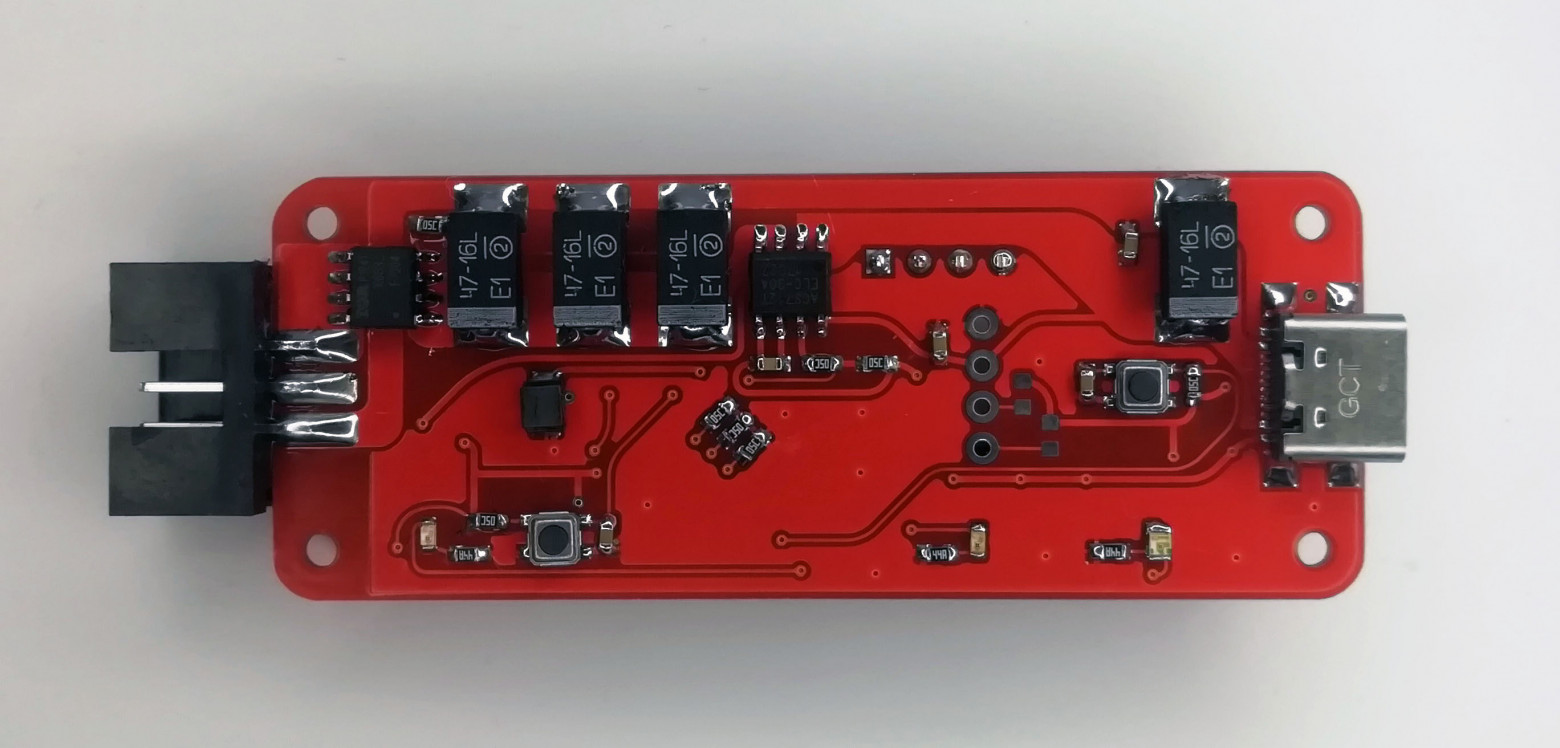
然后開發了調試板拓撲結構
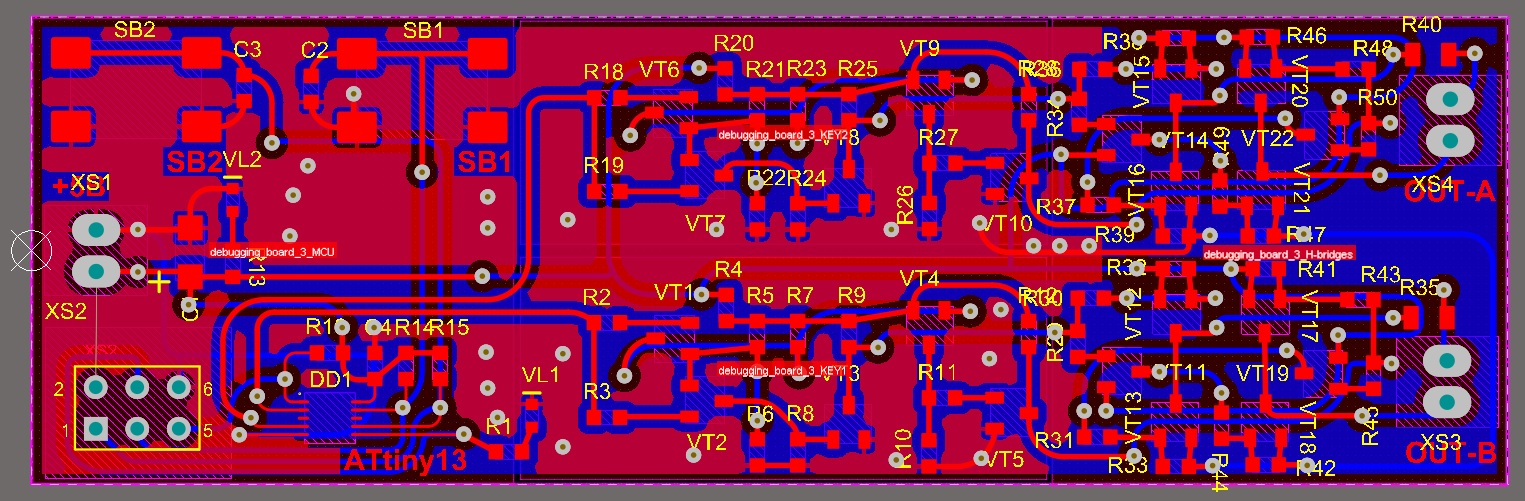
并且制作了一個原型,您可以根據該原型來調試步進引擎的控制算法:
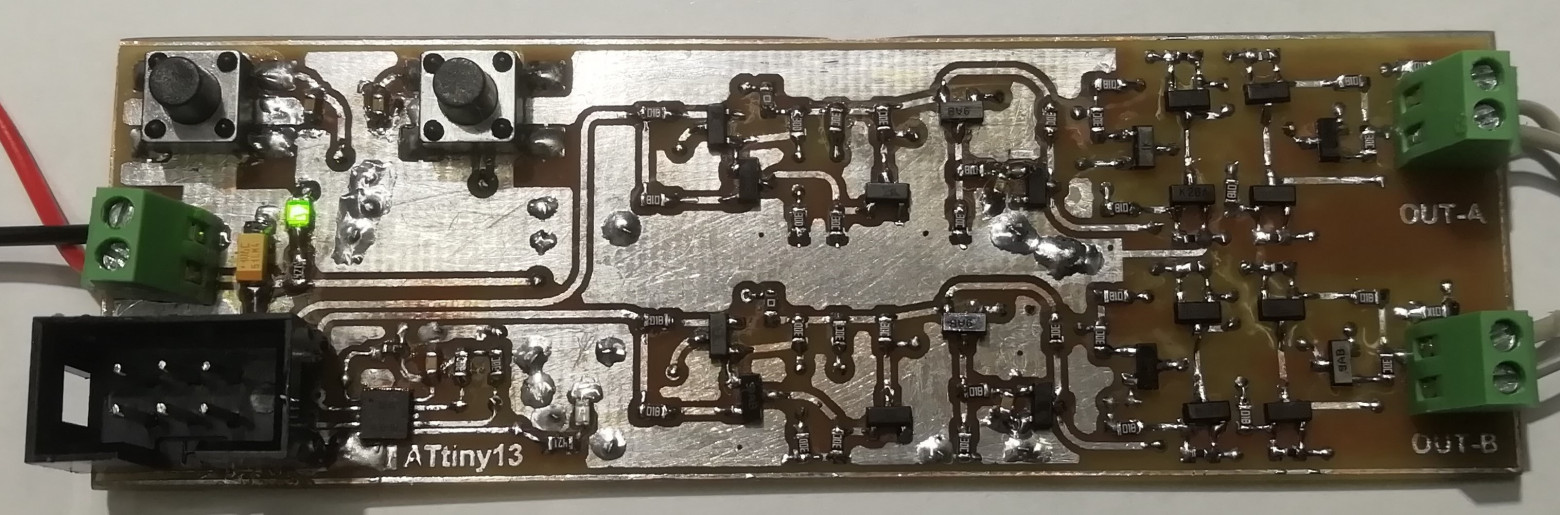
按下一個按鈕時,步進電機必須在左邊給定的步驟上旋轉。當您單擊另一個按鈕時,向右方的步驟數相同。奇怪的是,這個決定很有效,而且非常穩定。
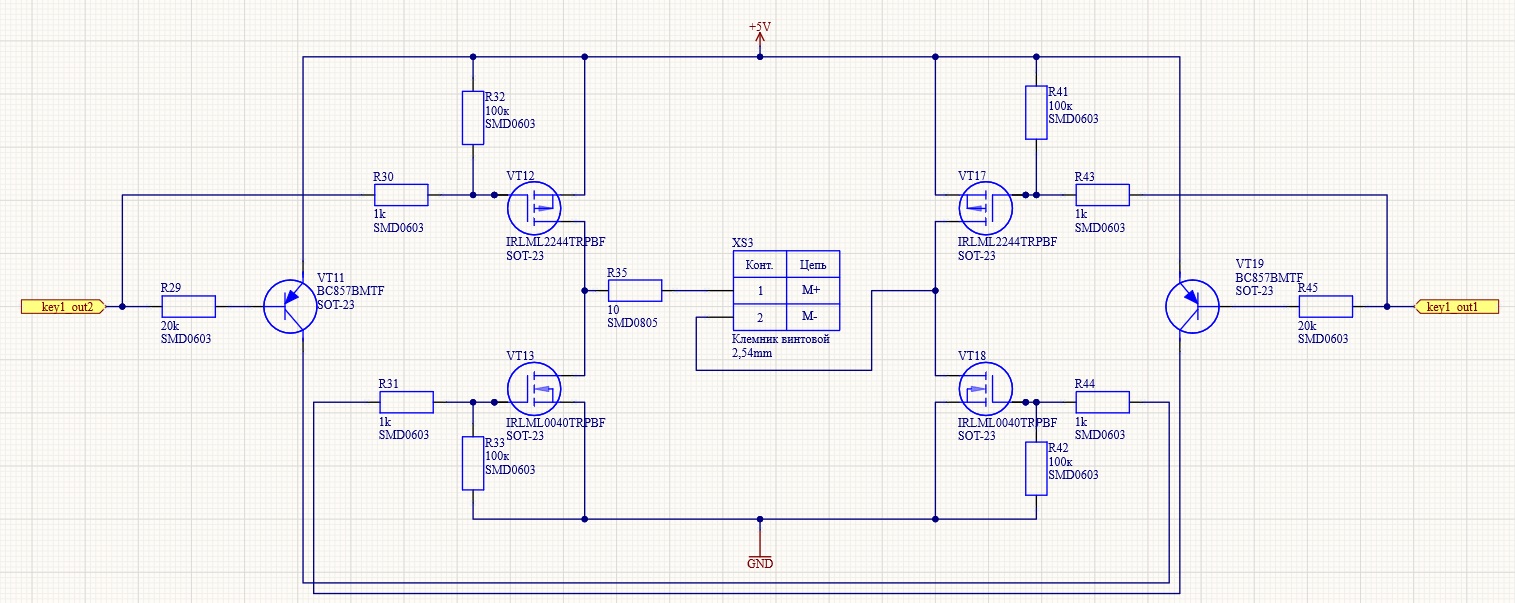
我非常喜歡這個想法,以至于我決定通過減少晶體管的數量來進一步改進方案。使用場管時,可以增加分壓電阻的面額,這應進一步減少器件運行過程中的泄漏電流。建議更新開關和H橋的方案:
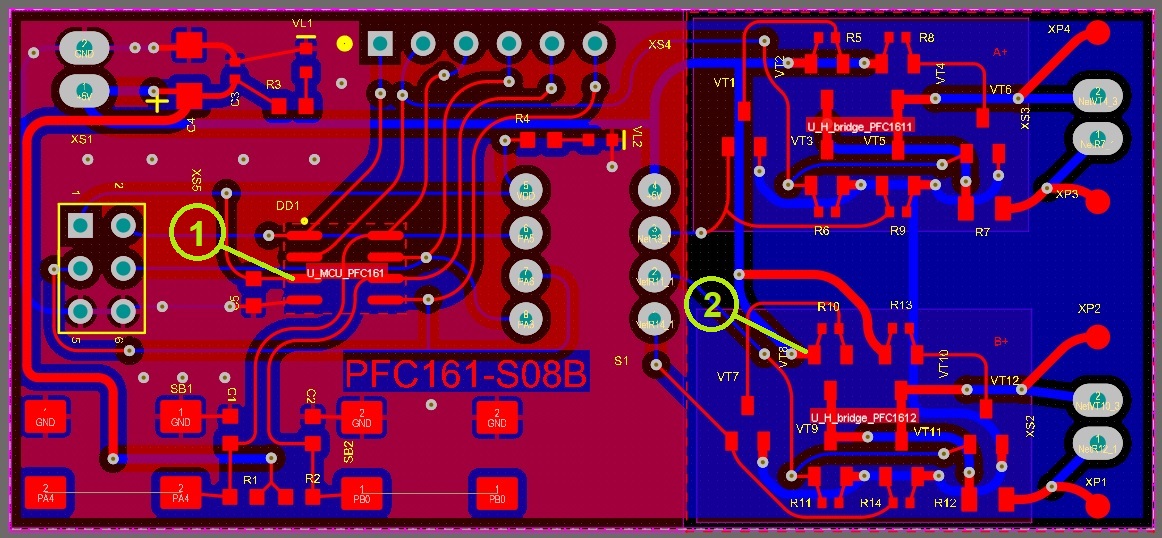
基于PFC161-U08B的調試板實驗
SOIC8 情況下的微控制器 PFC161 允許您使用 2 針控制每個 H 橋。為了調試固件并檢查電路解決方案,開發了基于PFC161微控制器的調試板。在應廣科技微控制器的出版物中告訴了你更多關于這筆費用的信息。由于該芯片的文檔顯示了編程內部編程的模式,我決定使用它。
在那篇文章下,正確地向我指出了電路中的缺點:晶體管的保護二極管的缺乏,以及橋的功率上的電容。我決定不接受這個詞,而是看看當方案起作用時,電源線會發生什么。
實驗:以全步模式控制步進電機。發動機繞組30ome的電阻。持續包括電阻的電阻10Om。電源電壓為5B橋。
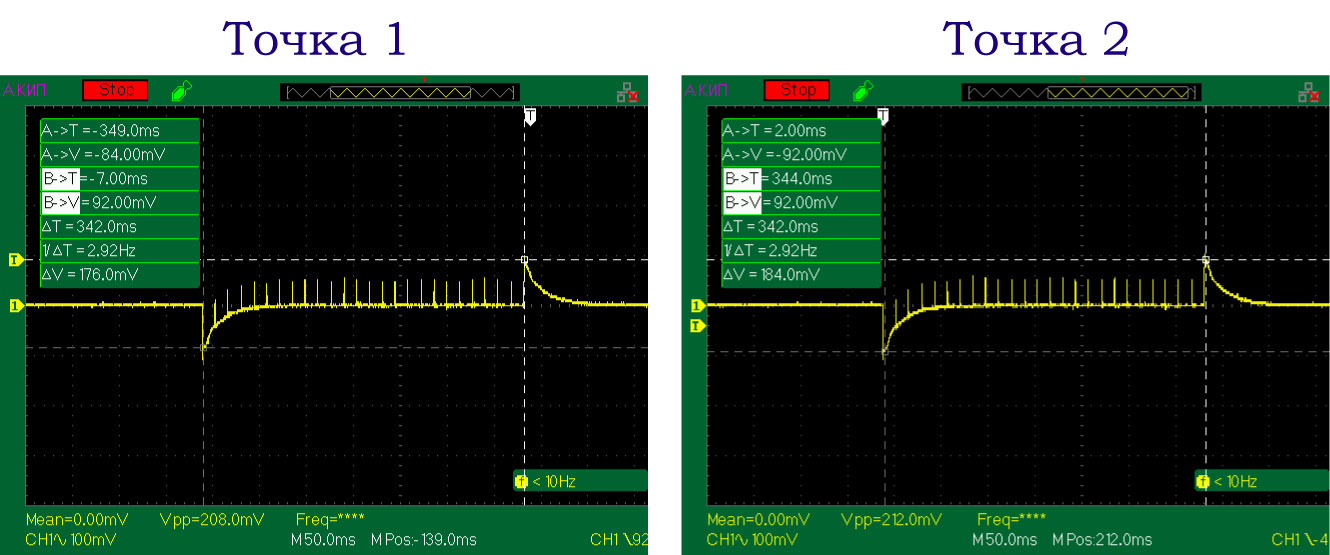
在兩個地方的調試板上,壓力的振蕩圖被移除。點1 - 直接在引腳3微控制器(VCC)上。第2點 - 較低的N橋費用的功率:
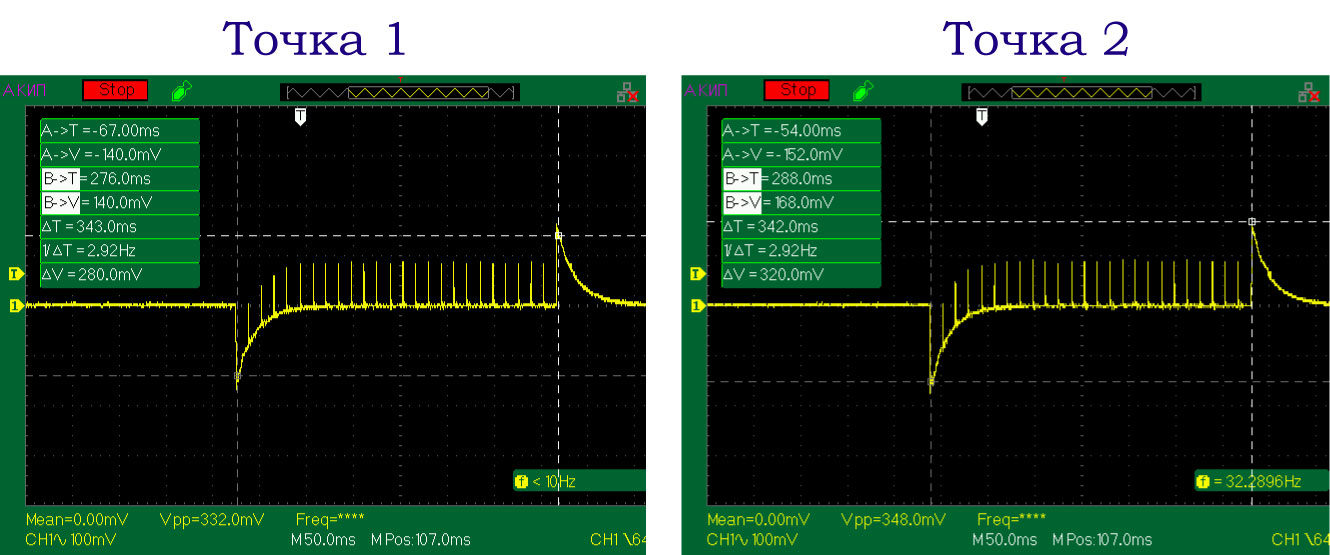
如您所見,MK的電壓以168 mV的振幅波動。發動機消耗的電流平均值為230ma。請注意,峰值數量是發動機步數的兩倍。
在第二個系列的實驗中,在微控制器的引腳旁邊安裝了10 μF x 50 V的電解冷凝器。
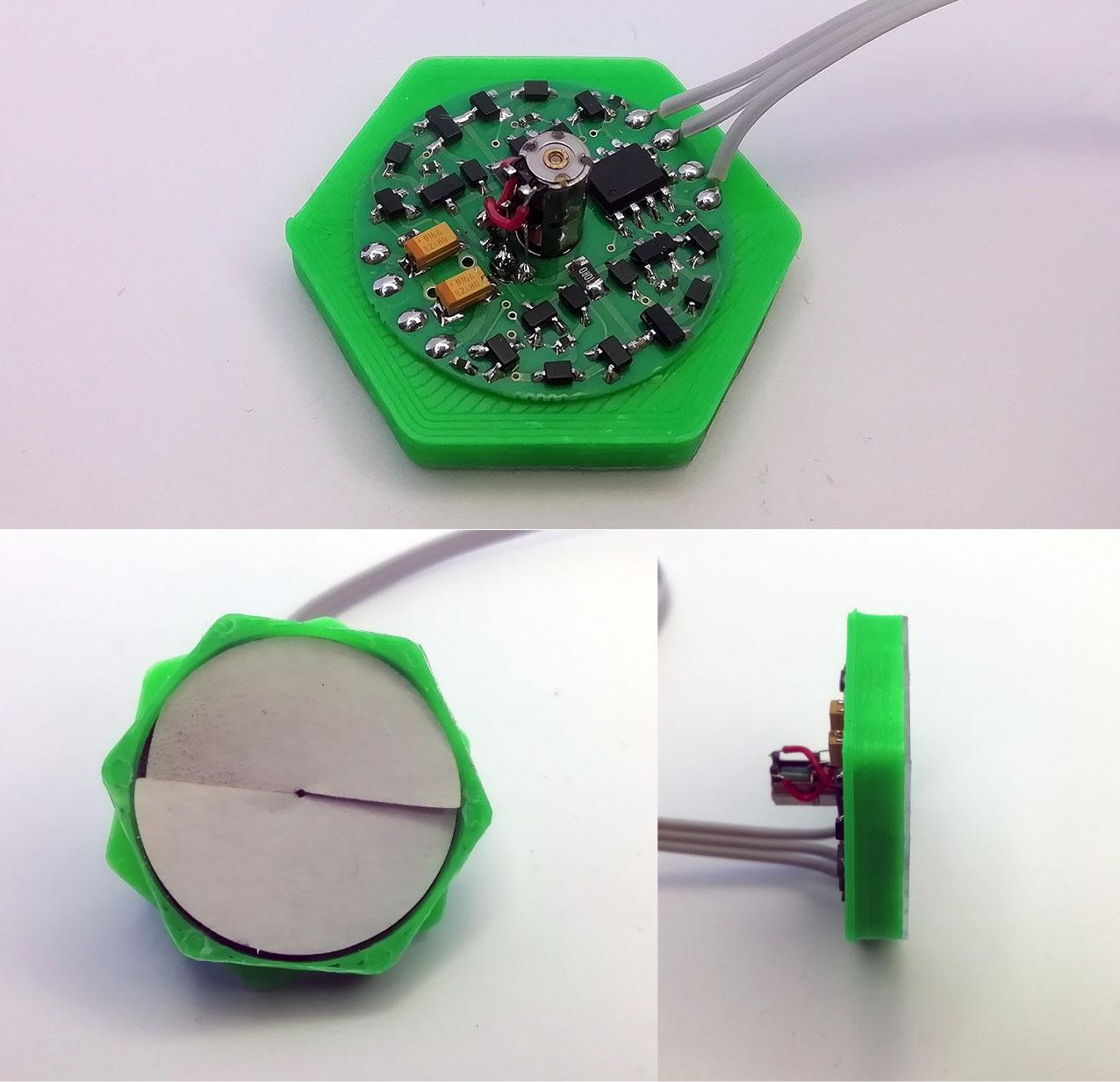
基于應應廣單片機PMS152微控制器的電子控制側的新版本,具有基于晶體管H橋的步進發動機驅動器發動機驅動器的當前版本
|
組件 |
編號 |
價格 (來自1 pcs。 |
費用 (來自1 pcs。 |
價格 (100p) |
費用 (100p) |
|
PMS152-SO8 |
1 |
0.08 |
0.08 |
0.06 |
0.06 |
|
步進 引擎 |
1 |
0,27 |
0,27 |
0,27 |
0,27 |
|
晶體管 N-MOSFET 2N7002 |
8 |
0.017 |
0.136 |
0.017 |
0.136 |
|
晶體管 P-MOSFET BSS84 |
4 |
0.018 |
0.072 |
0.018 |
0.072 |
|
肖特卡 二極管 |
8 |
0.04 |
0.32 |
0.04 |
0.32 |
|
電阻器 47com SMD0402 |
8 |
0.0037 |
0.0296 |
0.0037 |
0.0296 |
|
恢復 220Om SMD0402 |
2 |
0.0006 |
0.0012 |
0.0006 |
0.0012 |
|
陶瓷電容器 0.1mμgF 25V SMD0402 |
2 |
0.0012 |
0.0024 |
0.0012 |
0.0024 |
|
陶瓷 capsator 10mcF 10V SMD0402 |
2 |
0.03 |
0.06 |
0.03 |
0.06 |
|
美元匯率 (05.08.2022) |
60,26 |
共計(美元) |
0.91 |
共計(美元) |
0.89 |
|
|
|
共計(Rube): |
55.35 |
共計(Rube): |
54.14 |
應廣單片機微控制器的睡眠模式的特點
要切換到降低功率模式,有一個特殊的 stopsys 處理器命令。執行此命令后,微控制器的所有生成器都停止,程序內存和小外圍被切斷。只有在其中一個引腳上更改邏輯級別時,您才能擺脫此模式。這里有一個特點。
相同的微控制器可以在不同情況下產生,輸出數量不同。這并不意味著晶體本身的拓撲結構會以某種方式發生變化,只是當將這種晶體放置在體內時,一些推論不會沸騰。
只有微控制器的外部結論才用于擺脫睡眠模式。哪一個:由PADIER和PBDIER寄存器確定。如果適當的咬合是"1 " , 則輸出用于釋放其睡眠模式。此外,默認情況下(在控制器重置之后),所有位都安裝在“1”中,也就是說,微控制器從卷軸上的每條沙沙聲中醒來。和字面上!
SOIC-8 機箱中的 PFC161 微控制器沒有 PB7 輸出,但 PBDIER 寄存器具有相應位,可用作喚醒事件源。如果 PADIER = 0x00 和 PBDIER = 0x80,控制器將使用此引腳捕獲提示,因此它將不斷離開睡眠模式。
我無法弄清楚發生了什么很長一段時間。在團隊之后,控制器似乎在斷電失敗,但電流顯示在70mka的區域內,這與日期中所說的1mka不對應。事實證明,我沒有正確配置這些非常PxDIER端口寄存器。
還有一個小功能:如果位在PxDIER中掉落,那么即使配置了相應的引腳,那么也不可能讀取值(在數據寄存器中是恒定的0)。不知道發生了什么......只有這樣的觀察。
另一則關于降低能源消耗的制度。要擺脫這種模式,微控制器需要一些時間。同時,MISC寄存器的第五位建立了微控制器的喚醒時間。默認情況下,它大約是內部低頻發生器(ILRC)的3000巴。但是有機會選擇一種模式,在這種模式中,覺醒只需要45個酒吧。無絕望日期中兩種模式的區別是什么?也許這在某種程度上是由于發電機在各種電源電壓下退出到穩定頻率的時間。一般來說,沒有不穩定與快速出路斷電模式。
ILRC的頻率為64kHz。45bar約為700MS。不多,但沒那么多。數據線上升趨勢的睡眠機制退出測試(藍圖)。當您在PA6踢上退出睡眠模式時,會設置高水平(黃色時間表)。一旦微控制器的低邏輯水平再次進入睡眠模式。實驗結果顯示為640mcS。這與計算的值相當一致。
應廣單片機是一種由應廣科技股份有限公司開發的微控制器IC,它具有高效能、低成本、高抗干擾和高可靠性的特點。
應廣單片機有多個系列,包括PMS、PFS、PFC、PMC、PFCU、PMSU等,適用于各種領域,如消費電子、工業控制、汽車電子、智能家居等。
應廣單片機,應廣PMC單片機-逐高電子現貨供應,應廣芯片,臺灣應廣單片機,應廣IC
深圳市逐高電子有限公司分銷應廣單片機系列產品,型號齊全貨源優勢,我們是臺灣應廣單片機一級代理商,免費提供樣品